Každého asi zajímá, jak jeho model rakety vyletí vysoko a jaké nejvyšší rychlosti dosáhne. Dále v kterém okamžiku je na vrcholu své dráhy, tento údaj je důležité znát třeba pro správné načasování otevření padáčku. Programy na výpočet těchto i dalších hodnot lze na internetu najít, jsou však všechny v angličtině, údaje se mnohdy zadávají v u nás nepřirozených jednotkách a některé je nutno zaplatit. I když asi nemám dostatečné teoretické znalosti z aerodynamiky a matematiky, nedalo mi to a pokusil jsem se napsat jednoduchý program, který simuluje svislý let rakety a výsledky kromě tabelovaných hodnot zobrazuje též graficky. Nepsal jsem jej podle nějakého návodu, algoritmus jsem si vymyslel a rozhodně netrvám na tom, že je správný. Výsledky jsou však poučné a dle mého pohledu se dost blíží realitě, tak jej předkládám všem případným zájemcům k posouzení a volnému použití.
| Program s ukázkovými parametrickými soubory ke stažení : slr.zip (30kB) |
Program je obyčejný DOSovský, malý, rychlý a na systémové prostředky nenáročný. Grafická karta jakákoliv VGA. Spouští se bez parametrů. Řídí se pomocí parametrického souboru, výstupem je jeden textový soubor a tři grafické ve formátu GIF. Grafy průběžně zobrazuje na obrazovce, klávesou Esc lze kdykoli ukončit, jinou klávesou, třeba Enter, se pokračuje na další graf.
Princip činnosti programu.
Toto není potřeba znát, tak jen stručně pro ty, které to zajímá. Základním principem je krokování letu rakety po krátkých časových okamžicích. Pro tabelovaný výstup a grafy 1 a 2 je to po jedné milisekundě, pro graf 3, kde se počítá celá řada simulací pro různé startovní hmotnosti, je to po deseti milisekundách. Toto dělení bylo zvoleno jako kompromis mezi přesností výpočtu a jeho rychlostí. Malá nepřesnost se může projevit v oblastech větší změny součinitele odporu vzduchu, typicky v transsonickém intervalu rychlosti, "roztřesením" grafu. V každém kroku výpočtu program zjistí aktuální součinitel odporu vzduchu, a to buď interpolací ze zadané tabulky hodnot nebo modifikací jediné zadané hodnoty dle aktuálního Machova čísla dle aktuální výšky. Pokud se raketa nachází v motorové fázi letu, ze zadaných hodnot tahu motoru zjistí interpolací jeho okamžitou hodnotu a modifikuje okamžitou hmotnost rakety o úbytek PH. Dle okamžité výšky vypočte aktuální měrnou hmotnost vzduchu pro standardní atmosféru. Pak už provede výpočet aerodynamického odporu a tím je i známa celková síla, působící na raketu, součtem s již známým tahem motoru a gravitační silou, danou okamžitou hmotností a zemským gravitačním zrychlením. Následuje výpočet zrychlení, přírůstku rychlosti a dráhy. Průběžně se nasčítávají i další zajímavé hodnoty.
Použité soubory. (Všechny v aktuálním adresáři)
Parametrický soubor.
Jedná se o soubor slr.par v aktuálním adresáři. Je to obyčejný textový soubor, který lze vytvořit a modifikovat obyčejným textovým editorem. Prázdné řádky a řádky začínající znakem '#' se ignorují. Číselné údaje jsou odděleny jednou nebo více mezerami, za nimi lze po oddělení taktéž jednou nebo více mezerami cokoliv připsat. To umožňuje si parametrický soubor okomentovat.
Příklad :
# Parametricky soubor programu SLR # Parametry modelu a startoviste. 0.001 celni plocha v [m2] 0.331 startovni hmotnost v [kg] 0.064 hmotnost TPH v [kg] 300 nadmorska vyska startoviste v [m] # Soucinitele odporu vzduchu. 4 pocet nasledujicich dvojic rychlost[Mach] cx 0 0.7 0.8 0.7 1 1.5 1.5 1 # Charakteristika motoru. 18 pocet nasledujicich dvojic cas[s] tah[N] 0 0 0.027 40.2 0.053 43.3 0.107 46.4 0.160 49.4 0.213 58.7 0.267 66.4 0.320 74.2 0.373 80.3 0.426 95.8 0.480 98.9 0.533 100.5 0.586 102 0.640 102 0.693 103.5 0.746 98.9 0.800 77.3 0.853 0
Z první čtveřice datových řádků si zaslouží pozornost pouze čelní plocha rakety. Raketa za letu nemusí být obtékána přesně souose. Prvním důvodem jsou oscilace její osy, způsobené nepřesnostmi geometrického tvaru rakety a ne naprosto přesně souosým tahem motoru. Dalším důvodem je vektorový součet letu rakety a větru, raketa letí v turbulentní oblasti mezní vrstvy atmosféry a vzhledem k momentu setrvačnosti kolem příčných os nemůže v nepatrných zlomcích sekundy měnit směr letu dle nárazů větru. Nepatrný odklon pouhého jednoho stupně může zvýšit plochu průmětu na normálovou plochu vektoru letu zhruba o desítky procent. Totéž platí pro ne zcela přesně podélně přilepené stabilizátory, kde chyba jednoho stupně nebude ani viditelná. Výsledkem je, že jakmile raketa neletí zcela klidně a v klidné atmosféře, dostup se citelně snižuje. Doporučuji proto čelní plochu zadávat o něco větší, než je skutečná.
Součinitel odporu vzduchu (dále značen cx) je asi nejproblematičtějším parametrem výpočtu. Jeho hodnota se mění v závislosti na rychlosti letu. Pro různá tělesa se zjišťuje měřením v aerodynamickém tunelu. Taktéž existují programy, jako například Aerolab, které ho pro model rakety počítají, jejich princip je mi ale neznámý. V mém programu je možno zadat jej dvěma způsoby. Kdo si někde dokáže zjistit tabelované hodnoty cx pro svůj model v závislosti na rychlosti, může tuto tabulku hodnot zadat v parametrickém souboru tak, jak je na krátké ukázkové posloupnosti předvedeno na výše uvedeném příkladu. Pro většinu zájemců to ale asi bude problém, proto můj program umožňuje zadat pouze jedinou hodnotu cx, pro dané těleso odhadnutou. V subsonické oblasti letu se hodnota cx příliš nemění. Pro vyšší rychlosti letu program předpokládá, že raketa je vhodně tvarována pro let nadzvukovou rychlostí, a dle toho modifikuje zadané cx v transsonickém a vyšším oboru rychlosti.
| Odhad hodnot cx pro několik běžných amatérských sestav | |
| Samotný motorek se stabilizační lištou | 2 |
| Samotný motorek se stabilizační lištou a hlavicí | 1.5 |
| Malá raketka bez hlavice | 1.5 |
| Malá raketka s provizorní hlavicí | 1 |
| Dobře udělaný model rakety cca 30cm dlouhý | 0.7 |
| Dobře udělaný velký, cca 1.5m dlouhý model rakety | 0.5 |
V tomto případě zadání jediné odhadnuté hodnoty součinitele odporu vzduchu bude patřičná část parametrického souboru vypadat například takto:
# Soucinitele odporu vzduchu. 1 pocet nasledujicich dvojic rychlost[Mach] cx 0 0.8
Tah motoru se zadává zcela obdobně. Hodnoty pro konkrétní motor je třeba změřit. Samozřejmě je také možné je odhadnout a zkusit, jak to dopadne. Pokud je znám nebo alespoň odhadnut střední tah motoru a doba jeho chodu, je možno zadat jeho tah úplně nejjednodušeji takto:
# Charakteristika motoru. 2 pocet nasledujicich dvojic cas[s] tah[N] 0 3 6 3
V tomto případě by se jednalo o motor se středním tahem 3N po dobu 6s. Například zhruba takový má motorek na sorbitolovou TPH s čelním odhoříváním jádra o průměru 19mm, délce 50mm a s tryskou o průměru 2.5mm. Je ale lepší, když průběh tahu začíná i končí na nule, t.j. tah má nějaký "náběh" a "doběh", jinak je na grafech nespojitost. Třeba takto:
# Charakteristika motoru. 4 pocet nasledujicich dvojic cas[s] tah[N] 0 0 0.5 3 6 3 6.5 0
Tak to je asi vše, co je nutné vědět pro pokusy s programem. Jen upozorním na nutnost pečlivé formální i logické kontroly parametrického souboru. Program jsem dělal pro potřebu svojí a případného úzkého okruhu zájemců, tak neobsahuje žádný kontrolní kód a v případě zadání nekorektních dat vyplodí nesmysly nebo zdechne.
Ukázkové výpočty, které jsem dělal pro předvedení zde a pro své kolegy již dříve. Jsou provedeny starší verzí programu, kde byly ještě některá další zjednodušení, takže případný přepočet nemusí dát zcela shodné výsledky.
Základní údaje o umístění hmotového těžiště i působiště aerodynamických sil jsou již popsány na začátku mých základních stránek. Polohy těchto bodů jsou stěžejní pro stabilitu letu, nemají ale žádný vliv na odpor vzduchu a předpokládám, že čtenář již v tomto okamžiku jejich význam zná. Dále budu předpokládat, že raketa letí s nulovým úhlem náběhu, t.j. optimálně, rovně, bez výkyvů a v klidné atmosféře. Pro tento základní případ se pokusím jednoduše a bez vzorců přiblížit, jaký odpor klade vzduch letící raketě. Tento odpor je totiž základním omezujícím faktorem dostupu malých raketek, bez něj by doletěly mnohonásobně výš, a to jednotky až desítky km. Proto každé snížení odporu vzduchu má na dostup citelný vliv.
Reynoldsovo číslo, dále uváděné zkratkou Re, je bezrozměrné číselné kritérium, charakterizující poměr mezi setrvačnými a třecími silami ve vazkém prostředí zesílený charakteristickou délkou tělesa, v našem případě trupu rakety a u stabilizátorů hloubkou jejich profilu. Lze jej vypočíst jako součin rozměru tělesa ve směru pohybu, rychlosti pohybu a převrácenou hodnotou kinematické viskozity prostředí. Ta je dána poměrem dynamické viskozity a měrné hmotnosti v našem případě vzduchu, takže se mění nejen s výškou, ale i teplotou. Za běžných podmínek při zemi se převrácená hodnota kinematické viskozity vzduchu pohybuje kolem 70000, takže pro raketku o délce 30cm letící rychlostí 100m/s je Re=70000*0.3*100=2100000 a pro její stabilizátory o střední hloubce dejme tomu 4cm je to 70000*0.04*100=280000.
Kritické Re je taková hodnota, nad kterou již převáží progresívní vliv setrvačných sil nad regresívními silami od vazkosti prostředí. Proudění kolem tělesa je pak rovnoměrné, laminární obtékání přední části plynule přechází v přilehlé turbulentní. Naopak při podkritických Re číslech je větší přední část tělesa obtékána s nestabilní laminární mezní vrstvou, která se od povrchu snadno odtrhává, vznikají rychle se měnící laminární bubliny, jakési čočkovité útvary pod odtrženou mezní vrstvou, kterými vzduch neprochází. Ačkoliv čisté laminární obtékání klade menší odpor než turbulentní, vliv nestabilit převáží a mohou vznikat rušivé boční síly. Naštěstí i malá raketka rychle dosáhne takové rychlosti letu, že její obtékání je nadkritické. Trup je dostatečně dlouhý a stabilizátory mají tenký profil, který má nízké kritické Re a kde se ani vliv podkritického obtékání příliš neprojevuje. U některých těles je ale vliv výrazný, typická je koule. Při překonávání oblasti kritického Re, to je cca 250000 až 400000, klesne součinitel odporu vzduchu až 4x.
Machovo číslo, dále uváděné zkratkou M, je rychlost vztažená k rychlosti zvuku v daném prostředí. Ve vzduchu při zemi je to rychlost 340m/s, s výškou lehce klesá. S ním těsně souvisejí obory rychlostí, označované jako subsonická, transsonická, supersonická a hypersonická rychlost.
Subsonická rychlost je rychlost pod rychlostí M1. Nás bude nejdříve zajímat nízká subsonická rychlost, kdy se na obtékání ještě neprojevuje stlačitelnost vzduchu. Hlavní složkou odporu je odpor třecí, součinitel odporu je kromě počáteční vyšší hodnoty dané podkritickým obtékáním téměř konstantní. Zvuk se z pohybujícího se tělesa šíří všemi směry, pouze vlivem Dopplerova jevu jej pozorovatel před tělesem slyší posunutý k vyšší frekvenci a za tělesem k nižší. Optimální tvar tělesa je známý kapkovitý, u rakety klasická hlavice se zaoblenou špičkou, vyhoví i polokulovitá. Stabilizátory se zaoblenými náběžnými hranami a ostrými odtokovými, v případě vytvarování do souměrného profilu pak štíhlý kapkovitý s největší tloušťkou zhruba v jedné třetině hloubky.
Transsonická rychlost je rychlost v okolí rychlosti M1. Začíná zhruba na rychlosti M0.6 až M0.8, kdy se začíná projevovat stlačitelnost vzduchu. Je třeba si uvědomit, že proud vzduchu nabíhající na těleso se před ním zpomalí, uhne do strany a pak naopak zrychlí, takže ačkoliv je rychlost tělesa ještě podzvuková, v některých místech na jeho povrchu již rychost proudu může rychlosti zvuku dosáhnout. Stlačující se vzduch se projeví nárůstem tlakové složky odporu, která rychle stoupá a při rychlosti M1 dosáhne plné hodnoty. Jak vysoká tato hodnota bude závisí na tvarování tělesa. Optimální tvar je štíhlé těleso (u rakety hlavice) s dlouhou ostrou špičkou. V případě stabilizátorů s ostrou náběžnou i odtokovou hranou, v případě vytvarování do souměrného profilu pak profil s ostrou náběžnou hranou a s největší tloušťkou v polovině hloubky. U takto optimálně tvarovaného tělesa se součinitel odporu zvýší cca o dvě třetiny, ale u nesprávně tvarovaného, třeba polokulové hlavice, až několikanásobně a překonání rychlosti zvuku je pak bez enormního výkonu nemožné.
 Při rychlosti blížící se M1 dojde k dalšímu zajímavému jevu. Zvukové vlny, do této chvíle se šířící všemi směry, se již nemohou šířit dopředu a před tělesem se naskládají jedna na druhou, čímž zde způsobí vytvoření tlakové vlny. Obrázek vpravo krásně demonstruje její vznik. Je na něm zachycena jízda vozidla, poháněného leteckými turbokompresorovými motory, po pouštním povrchu rychlostí M0.95. Vznikající tlaková vlna je trochu přímo pozorovatelná vlivem refrakce světla na ní, ale velmi dobře je patrný pás terénu s vyšším albedem povrchu po jeho zvíření přechodem vlny.
Při rychlosti blížící se M1 dojde k dalšímu zajímavému jevu. Zvukové vlny, do této chvíle se šířící všemi směry, se již nemohou šířit dopředu a před tělesem se naskládají jedna na druhou, čímž zde způsobí vytvoření tlakové vlny. Obrázek vpravo krásně demonstruje její vznik. Je na něm zachycena jízda vozidla, poháněného leteckými turbokompresorovými motory, po pouštním povrchu rychlostí M0.95. Vznikající tlaková vlna je trochu přímo pozorovatelná vlivem refrakce světla na ní, ale velmi dobře je patrný pás terénu s vyšším albedem povrchu po jeho zvíření přechodem vlny.
Po dalším zvýšení rychlosti se tato vlna tělesem jakoby prolomí, začne ubíhat dozadu a vytvoří se Machův kužel. Dobrou představu si lze utvořit pohledem na vlny na vodě, rozbíhající se od přídě jedoucí lodi. A zcela obdobně, čím je rychlost vyšší, tím je kužel ostřejší. V blízkosti většího tělesa letícího nadzvukovou rychlostí, například nadzvukového letadla, má v jeho blízkém okolí Machův kužel vlastnosti natolik silné tlakové (rázové) vlny, že může mít i destrukční účinky. Ve větší vzdálenosti se mění na intenzívní zvukovou vlnu, známou pod pojmy sonický třesk nebo aerodynamický třesk. U odlétající rakety nemůže být slyšet, pozorovatel se nalézá uvnitř Machova kuželu. Po překonání rychlosti zvuku dochází k zajímavému jevu, a to k poklesu součinitele odporu. Tlakový odpor již dále nestoupá, třecí se lehce snižuje.
 Supersonická rychlost je rychlost nad rychlostí zvuku v daném prostředí. Součinitel odporu zpočátku mírně poklesne a pak už je v podstatě konstantní. Hlavní složkou odporu je odpor tlakový nebo též vlnový, daný stlačením vzduchu před tělesem a úplavem s podtlakem za ním. Na obrázcích vpravo je vzhled tlakové vlny, vytvářený klasickou hlavicí rakety a pak tupým zakončením místo hlavice. V tomto případě je vidět silné stlačení vzduchu a vytváření intenzívní tlakové vlny, tlakový odpor je pak obrovský. Hlavice nalevo také není optimální, měla by být delší, štíhlejší, s ostrou špičkou a hladká. Pak by se vytvářela jediná vlna od špičky. Jinak od nepřesností povrchu odstupují další slabší vlny.
Supersonická rychlost je rychlost nad rychlostí zvuku v daném prostředí. Součinitel odporu zpočátku mírně poklesne a pak už je v podstatě konstantní. Hlavní složkou odporu je odpor tlakový nebo též vlnový, daný stlačením vzduchu před tělesem a úplavem s podtlakem za ním. Na obrázcích vpravo je vzhled tlakové vlny, vytvářený klasickou hlavicí rakety a pak tupým zakončením místo hlavice. V tomto případě je vidět silné stlačení vzduchu a vytváření intenzívní tlakové vlny, tlakový odpor je pak obrovský. Hlavice nalevo také není optimální, měla by být delší, štíhlejší, s ostrou špičkou a hladká. Pak by se vytvářela jediná vlna od špičky. Jinak od nepřesností povrchu odstupují další slabší vlny.
 Za intenzívní tlakovou vlnou v blízkosti rozměrného tělesa, pronikajícího supersonickou rychlostí plynným prostředím, postupuje vlna podtlaku. Opět přirovnám k vlně na vodní hladině za přídí lodě, za vyklenutím hladiny postupuje její prohloubení. V případě letadla, letícího nadzvukovou rychlostí v dostatečně vlhké atmosféře, může být podtlaková vlna zviditelněna kondenzací vodní páry, způsobené snížením teploty vzduchu jeho adiabatickou expanzí pod aktuální teplotu rosného bodu. Oblast sníženého tlaku zpravidla zasahuje ocasní plochy letadla, čímž se zhoršuje jeho řiditelnost. To byl ostatně jeden ze základních problémů při prvních pokusech o dosažení a překonání rychlosti M1 letadlem. Ze stejného důvodu mají nadzvuková stíhací letadla překvapivě velké ocasní plochy, často zdvojené velké směrové stabilizátory. I u rakety je potřeba počítat s tím, že při překonávání rychlosti zvuku se posune působiště aerodynamických sil dopředu a může dojít ke zhoršení stability.
Za intenzívní tlakovou vlnou v blízkosti rozměrného tělesa, pronikajícího supersonickou rychlostí plynným prostředím, postupuje vlna podtlaku. Opět přirovnám k vlně na vodní hladině za přídí lodě, za vyklenutím hladiny postupuje její prohloubení. V případě letadla, letícího nadzvukovou rychlostí v dostatečně vlhké atmosféře, může být podtlaková vlna zviditelněna kondenzací vodní páry, způsobené snížením teploty vzduchu jeho adiabatickou expanzí pod aktuální teplotu rosného bodu. Oblast sníženého tlaku zpravidla zasahuje ocasní plochy letadla, čímž se zhoršuje jeho řiditelnost. To byl ostatně jeden ze základních problémů při prvních pokusech o dosažení a překonání rychlosti M1 letadlem. Ze stejného důvodu mají nadzvuková stíhací letadla překvapivě velké ocasní plochy, často zdvojené velké směrové stabilizátory. I u rakety je potřeba počítat s tím, že při překonávání rychlosti zvuku se posune působiště aerodynamických sil dopředu a může dojít ke zhoršení stability.
Další obrázek je sice z trochu jiného oboru, ale efekty jsou obdobné.
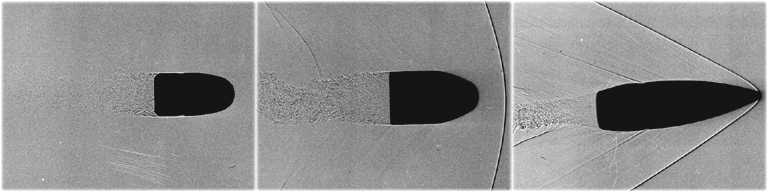
Jedná se o stínové obrázky letících projektilů ze střelné zbraně. Na prvním je projektil s půlkulatou náběžnou částí, letící nízkou subsonickou rychlostí. Pro ní je tento tvar dobrý, vzduch jej plynule obtéká, viditelné jsou pouze víry v úplavu za projektilem. Pokud ale obdobný projektil dosáhne rychlosti M1, dojde před jeho oblou náběžnou částí ke stlačování vzduchu, vytváří se výrazná tlaková vlna a projektil je silně bržděn. Na posledním obrázku je pak ostrý špičatý projektil při supersonické rychlosti. Je vidět stín Machova kužele, táhnoucího se od špičky projektilu dozadu a taktéž další vlnky, odstupující od nerovností povrchu, zvláště pak od příčné drážky v jeho zhruba třech čtvrtinách délky.
S dalším vzestupem rychlosti je možné postupně opustit klasickou představu obtékání tělesa prostředím o nějaké viskozitě. Prostředí, v našem případě vzduch, není spojité, skládá se z jednotlivých molekul plynů. Při vysokých supersonických rychlostech se tato nespojitost projeví, molekuly již nestíhají dostatečně rychle spolu interagovat a začnou převažovat jejich přímé nárazy na povrch tělesa. Těmito nárazy se povrch tělesa začíná zahřívat, známý aerodynamický ohřev náběžných částí supersonických letadel a raket. Je třeba si uvědomit, že těleso se již pohybuje výrazně rychleji, než je střední rychlost molekul plynů daná teplotou.
Hypersonická rychlost je vysoká supersonická rychlost, mnohonásobně převyšující rychlost zvuku v daném prostředí. Uplatňuje se například při vstupu těles z vesmírného prostoru, ať už umělých nebo přírodních, do atmosféry Země. Molekuly plynů již volně narážejí na povrch tělesa. Plyn se pro toto těleso jeví, jako by měl teplotu danou střední rychlostí srážek. Odražené molekuly získávají vysokou rychlost, t.j. teplotu, do které se transformuje brzdná energie tělesa. Těleso se na náběžné části rozžhavuje, horký plyn jej obtéká a vytváří za ním viditelnou stopu.
Třecí odpor je největší složkou celkového odporu aerodynamicky dobře tvarovaného tělesa zvláště při nízkých rychlostech. Je způsoben viskozitou prostředí. Pokud na vzduch pohlédneme jako na prostředí složené z volně se pohybujících částic (molekul), pak vrstva částic přiléhající k povrchu tělesa je jím unášena, každá další vrstva se pohybuje odlišnou rychlostí a vzájemná tření mají za následek vlastní odpor. Jeho snížení u modelu rakety se dosáhne hladkým rovnoměrným povrchem trupu i profilu stabilizátorů.
Tlakový (vlnový) odpor se při nízkých rychlostech aerodynamicky dobře tvarovaného tělesa, jako třeba štíhlé rakety, téměř neprojevuje. Stěžejní složkou odporu je pouze u těles typu deska postavená napříč proudění. Její odpor je pak dán rozdílem tlaku před ní a za ní. U rakety se začne výrazně uplatňovat až při rychlostech, kdy se začne projevovat stlačitelnost vzduchu, t.j. v transsonickém oboru rychlosti. Jeho snížení u modelu rakety se dosáhne správným tvarováním zvláště hlavice a profilu stabilizátorů s ohledem na dosahovanou rychlost.
Interferenční odpor je způsoben vzájemným ovlivňováním proudění kolem jednotlivých částí tělesa, které na sebe plynule nenavazují a vytvářejí podélné kouty. U modelu rakety se jedná o interferenci obtékání trupu a stabilizátorů. Jeho snížení se dosáhne vytvořením plynulých přechodů mezi stabilizátory a trupem, aby zde nebyl ostrý kout.
Indukovaný odpor vzniká tažením vírů či úplavů za tělesem. Je spíš znám u letadel, kde vzniká například přetékáním vzduchu z tlakové na sací stranu profilu na konci křídla a následným vznikem taženého víru. U rakety vzniká oblast podtlaku s víry (úplav) za jejím zadním koncem. V motorové fázi letu do této oblasti expandují plyny z trysky, ale jeho větší část je setrvačností. Snížení tohoto odporu lze dosáhnout plynulým zúžením zadní části trupu, optimálně až na průměr expanzního kužele trysky.
Pravidlo ploch. Snížení odporu, zvláště v transsonickém a supersonickém oboru rychlosti, lze dosáhnout návrhem tvaru dle tzv. pravidla ploch. To je takový průběh ploch příčných řezů tělesem, aby se tyto měnily co nejplynuleji, bez skokových změn. Typický je boční tvar stabilizátorů, pro vysoké rychlosti je i z tohoto důvodu vhodný silně zkosený dozadu. Plocha příčného řezu pak plynule narůstá z plochy řezu samotným trupem do plochy jeho součtu s plochou řezu přes stabilizátory. Ještě lepší je stav, kdy trup v části, kryjící se s náběžnou hranou stabilizátorů, zmenší plynule svůj vnější průměr takovým průběhem a natolik, aby plocha příčného řezu zůstávala konstantní. Dle tohoto pravidla jsou navržena i novější supersonická stíhací letadla. Trup je v oblasti před křídly, kde je kabina, poměrně objemný, ale směrem dozadu v oblasti náběžné hrany křídel se rychle zplošťuje.
Ukázkový výpočet součinitele aerodynamického odporu z programu AEROLAB :
Jedná se o konformní obrys a grafy pro let motorový i setrvačností a jeho jednotlivé složky pro model o průměru trupu 30mm a délce 300mm, stabilizátory o tloušťce 3mm, ostré hrany se zkosením 3x1.5mm, drsnost povrchu 40 mikronů. Je dobře patrná vyšší hodnota cx při velmi malých rychlostech vlivem nízkého Reynoldsova čísla a jeho dramatický nárůst kolem rychlosti M1 daný nárůstem tlakové složky odporu. Hodnoty jsou dost nízké, dané zřejmě ideálními podmínkami při výpočtu. Pro obdobně velký model jsem v literatuře nalezl změřenou hodnotu cx 0.75 při nízkých rychlostech, zde je zhruba poloviční. Dále se většinou uvádí, že maximální hodnoty dosahuje právě při rychlosti M1, nikoli o trochu vyšší. Posléze malý skokový nárůst třecího odporu trupu při rychlostech těsně nad M1 si nedovedu vysvětlit. U programu se začne výrazněji projevovat při větších drsnostech povrchu a posunuje se k vyšším rychlostem. Předpokládal bych, že se jedná o vznik parazitních rázových vlnek na ne zcela hladkém klenutém povrchu, ty ale již vznikají v transsonickém oboru rychlosti pod M1, nikoliv nad, vlivem zvýšené rychlosti obtékání. I letadlo může za vhodných podmínek vytvořit aerodynamický třesk, ačkoliv ještě rychlosti zvuku nedosahuje, o čemž se před několika lety mohli na vlastní uši přesvědčit návštěvníci CIAFu.
Závěrem musím upozornit, že nejsem žádným odborníkem v oblasti aerodynamiky a tak prosím neberte uváděné věci jako bezpečně správná fakta. Údaje jsem čerpal převážně z obyčejné, nikoliv vědecké a také již postarší literatury, z modelářských časopisů a z několika zahraničních internetových stránek. Specielně k nim bych ale chtěl dodat, že poznatky v nich uveřejňované se mnohdy dost rozcházejí a je třeba je ověřovat. Nicméně doufám, že tato stránka přinese základní poučení pro ty, které problematika zajímá.